

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-15
CAN BUS -интерфейс абсолютного фотоэлектрического энкодера вала
1 ВВЕДЕНИЕ Абсолютный фотоэлектрический угол вала - это цифровое устройство измерения угла, которое измеряет угловое положение и угловую скорость вращающегося вала в режиме реального времени. Он преобразует информацию о угле вала в цифровые коды в виде градусов, минут и секунд, и подключение к шине может реализовать измерение в реальном времени. Он обладает преимуществами высокой рабочей надежности, сильной способности противоположность, высокой точности, мощности памяти и так далее. Он широко используется в системах отслеживания и позиционирования цифровых измерений, таких как оборудование для съемки, цифровой теодолит, радар и некоторая большая военная техника.
В этих практических системах управления приложениями, из -за различных структур данных датчиков и детекторов каждой подсистемы, абсолютный фотоэлектрический энкодер вала будет использовать различные методы внутренней передачи данных, в основном включая RS232, RS485 / 488 последовательные порты, параллельные порты и т. Д. Полем Однако в конкретных инженерных приложениях вышеуказанные методы связи часто ограничены расстоянием передачи и скоростью связи. В последние годы серийная связь быстро развивалась, и появились различные формы полевых шин системы управления. Автобус CAN является одной из самых широко используемых. Это аббревиатура сетевой шины локальной области контроллера и является эффективной поддержкой распределенного управления и управления в режиме реального времени. Серийная коммуникационная сеть. Из-за высокой производительности, высокой надежности и уникального дизайна автобуса CAN он стал самым популярным и в реальном времени полевым автобусом дома и за рубежом. Разработка и изменения методов внутренней связи в системе управления делают энкодер, используемый для измерения углового смещения и угловой скорости, обеспечивают интерфейс шины CAN для удовлетворения требований конструкции FieldBus всей системы управления.
2 Принцип работы Encoder и передача данных
2.1 Структурная блок -схема показана в 1. Один чип -микрокомпьютер является основной частью системы схемы кодера. После сбора сигналов Encoder (грубый код, средний тонкий код, тонкий код), он подразделяется с помощью тонкого кода, коррекции канала кода, цифровой добавленной, электрической ноль -корректировкой, обработкой программного обеспечения, такими как степень, минутная и вторая конверсия, и, наконец, отображение и отображение и Осознайте интерфейс с системой управления.
2.2 Передача данных. Передача данных между кодером и системой управления может использоваться как в параллельных, так и в последовательных режимах. Параллельная передача передает данные через параллельный порт. Каждое данные требует одного ядра кабеля данных. Например, 24-ядерный кабель требуется для 24-битного энкодера. Следовательно, пространство использования ограничено, и оно подходит только для короткого расстояния передачи и особых требований. повод. При последовательной передаче информация данных передается последовательно через скрученную пару, а дополнительные биты добавляются в соответствии с различными протоколами связи для реализации таких функций, как коррекция ошибок. Эта функция может быть расширена на системы Data Bus. Последовательная передача имеет меньше проводов, меньше аппаратного обеспечения, низкой стоимости, длинного расстояния передачи, а также безопасных и надежных данных.

2.3 Предлагаемый интерфейс шины Encoder CAN В комплексном сравнении различных полевых шин система связи, основанная на шине CAN, имеет много превосходных характеристик: сигнал данных передается дифференциальным напряжением; Среда трансмиссии шины может использовать витую пару, коаксиальный кабель и оптическое волокно; может работать в режиме мультимастера, гибкий режим связи; может передавать и получать данные в точке с точки зрения, точка-мультипунктом и глобальным режимом вещания; Информация о узле в сети может быть разделена на разные приоритеты для удовлетворения различных требований в режиме реального времени; Неразрушающая автобусная арбитражная технология; Данные используют короткую структуру кадра, каждый кадр составляет 8byte, а частота ошибок данных низкая; Подблерель Mac слоя канала данных в протоколе связи обладает строгими возможностями обнаружения ошибок; У него есть международные стандарты и хорошую открытость. Следовательно, при преобразовании режима внутренней связи системы фотоэлектрического отслеживания шина CAN используется в качестве структуры шины передачи данных, а затем предлагается интерфейс шины Encoder CAN.
3 Применение интерфейса шины Encoder CAN в системе фотоэлектрического отслеживания
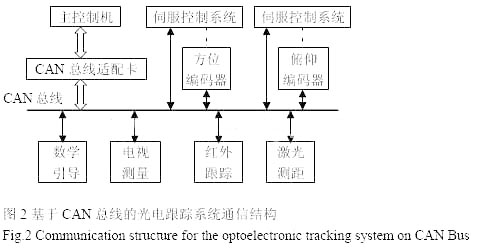
3.1 Энкодер используется для обнаружения положения системы фотоэлектрического отслеживания. Абсолютная фотоэлектрическая энкодер оси является датчиком для измерения азимута и угла шага системой фотоэлектрического отслеживания в системе фотоэлектрического отслеживания. Внутренняя автобусная структура системы фотоэлектрического отслеживания преобразуется в метод связи шины CAN. Интерфейс шины CAN имеет характеристики гибкого интерфейса и сохранения линий. В то же время он имеет микропроцессор и может использоваться в качестве интеллектуального узла в системе для отправки удаленных кадров непосредственно на другие устройства для достижения интеллектуального управления. Рисунок 2 представляет собой диаграмму структуры связи системы фотоэлектрического отслеживания на основе шины CAN. Система фотоэлектрического отслеживания использует одну последовательную автобусную структуру шины CAN вместо параллельной структуры множественных методов связи. Углы азимута и высоты тона, измеренные двумя фотоэлектрическими энкодерами, отправляются на основную управляющую машину через шину, а основная машина управления обрабатывает данные соответственно. Через систему управления управлением шиной, все подсистемы могут быть соединены вместе парой скрученных пар, которые упрощают проводку системы, улучшают общее использование системной шины, передачу данных в реальном времени и масштабируемость системы и ошибку битов скорость значительно снижается.
3.2 Узел энкодера банка аппаратной композиции интерфейса шины
Интерфейс шины CAN в основном состоит из однопоточного микрокомпьютера, контроллера шины CAN, драйвера шины CAN и аппаратного обеспечения для фотоэлектрического изоляции. Конкретная схема интерфейса связи шины CAN показана на рисунке 3.
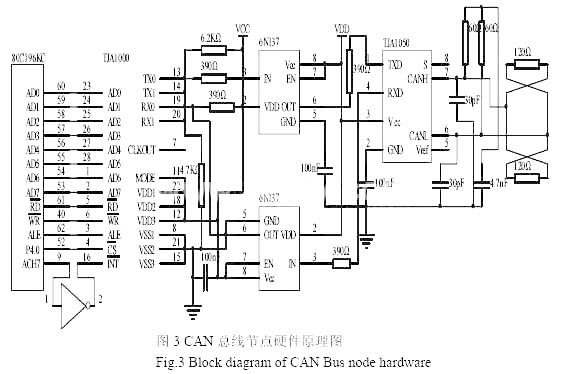
Одно-чипный компьютер выбирает Intel80C196KC, который представляет собой 16-битный встроенный микроконтроллер, который более подходит для сложных случаев управления в реальном времени. Он также отвечает за обработку данных энкодера и инициализацию узла шины CAN. Контроллер CAN выбирает SJA1000 Philips Semiconductor, чтобы реализовать интерфейс связи передачи данных между шиной и хост-компьютером (управляющий компьютер), поддерживает протоколы CAN2.0a и Can2.0b, имеет расширенный буфер приема на 64 байта и поддерживает первое место -out (FIFO) Принцип, поддержка 11-битных и 29-битных кодов идентификации, скорость связи до 1 Мбит / с может работать в режиме BasicCan и режиме Pelican. Водитель автобуса CAN выбирает Philips TJA1050, который представляет собой высокоскоростной водитель шины CAN, который обеспечивает интерфейс между контроллером CAN и физической шиной, реализует функции дифференциальной передачи и регистрации шины CAN и имеет широкий диапазон общих режимов При сильной дифференциальной дифференциальной интерференционной интерференционной способности уровень ввода совместим с устройствами 3,3 В, а неофициальные узлы не будут мешать шине. Присоединение TJA1050 может обеспечить высокоскоростную передачу данных. Для обеспечения безопасности и улучшенных возможностей антипонсирования используется хорошие симметричные характеристики TJA1050, используйте отдельные терминалы. Два небольших конденсатора 30pf подключены параллельно между Canh и Canl и Ground, что может отфильтровать высокочастотные помехи на шине и определенную способность предотвратить электромагнитное излучение. Чтобы дополнительно улучшить противоположную способность системы, высокоскоростной Optocoupler 6N137 используется между контроллером CAN-контроллером SJA1000 и драйвером CAN TJA1050 для формирования цепи изоляции для достижения гальванической изоляции. VCC и VDD питания с обеих сторон 6N137 полностью изолированы, что может предотвратить цепь одновременно, два сопротивления соответствующих импеданса шины 120 Ом должны быть подключены на обоих концах шины.
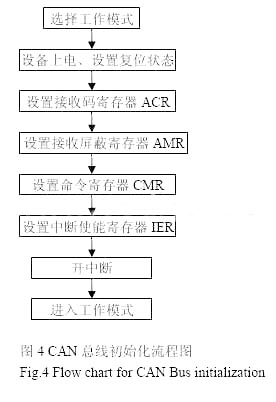
3.3 Программное обеспечение узла Информация о угле (градусы, минуты и секунды) энкодера абсолютной фотоэлектрической оси отправляется с контроллера CAN на шину CAN или с шины CAN к буферу CAN автоматически с помощью контроллера шины SJA1000. Программа связи интерфейса шины Can Bus состоит из подпрограммы инициализации, отправки подпрограммы и получения подпрограммы. Сначала выберите режим работы шины CAN в соответствии с фактическими потребностями системы. Здесь выберите режим Пеликана, кристаллический генератор 12 МГц, скорость передачи данных шины установлена на 500 кбит / с, каждый узел шины должен устанавливать одинаковую скорость передачи данных для обеспечения нормальной связи. Определите, что физическая связь между SJA1000 и MCU является надежной, а затем инициализируйте контроллер SJA1000. В режиме сброса SJA1000 установите начальное состояние каждого регистра. Блок -схема инициализации показана на рисунке 4. Передача и прием данных выполняются посыльной подпрограммой и приемной подпрограммой. Идентификатор сообщения определяет поток данных узла. При отправке данных принцип настройки сегмента бита флагов идентификатора сообщения составляет: соответствующий идентификатор узла, который необходимо получить, бит равен 0, а остальные биты - 1. При получении данных он противоположный. Идентификатор оценивается, является ли это информацией, отправленной себе. Это получено, а не отфильтровано.
4. Вывод
В качестве коммуникационного автобуса на полевом уровне, BAN Bus обладает высокой надежностью и затратами. Абсолютный фотоэлектрический энкодер вала с интерфейсом шины CAN делает его более гибким для использования в системах управления.
Эта статья является инновационной: интерфейс Ban Bus Encoder и его применение в системе фотоэлектрического отслеживания
Поделиться с:
Отправить Запрос

Ms. carol Dong
Номер Телефона :86-431-85543703
Fax:86-431---88634119
Мобильный Телефон:+8613894866263
Электронная Почта:sales@encoders.com.cn
Адрес Компании :333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
мобильный сайт
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.