

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-01-03
Обзор энкодера и применения Большинство кодеров используют оптические датчики для обеспечения электрических сигналов в форме импульсных поездов, которые, в свою очередь, могут быть преобразованы в информацию о движении, направлении или положении.
Роторные кодеры могут использоваться для измерения вращательного движения вала. На рисунке 1 показаны основные компоненты вращающегося энкодера, в том числе диод, излучающий свет (светодиод), кодовое колесо и датчик света на задней части кодового колеса. Это кодовое колесо помещается на вращающийся вал с непрозрачными и светообрабными вентиляционными областями, расположенными в кодируемой форме. Когда кодовое колесо вращается, непрозрачные сектора блокируют свет, а секторы передачи света позволяют свету проходить. Это создает импульсы квадратных волн, которые могут быть составлены в соответствующую позицию или информацию о движении. Энкодер обычно делится на от 100 до 6000 секторов за революцию. Это показывает, что 100-секторный энкодер может обеспечить точность 3,6 градуса, в то время как 6000-секторный энкодер может обеспечить точность 0,06 градусов.
Линейные энкодеры работают как ротационные кодеры. Он использует фиксированную непрозрачную полосу для замены вращающегося кодера, с некоторыми светопроводными зазорами на непрозрачной поверхности полосы, а узел светодиодного детектора прикреплен к движущемуся корпусу.

Рисунок 1. Компоненты оптического энкодера
Только один выходной энкодер импульса не может определить угол поворота, поэтому он бесполезен. Если используются два кодовых канала, а разность фаз между их секторами составляет 90 градусов (как показано на рис. 2), два выходных канала квадратурного энкодера могут определить двух данных о положении и направлении вращения. Например, если канал A ведет фазу, кодер вращается по часовой стрелке. Если канал B ведет фазу, то кодовое колесо вращается против часовой стрелки. Следовательно, мониторинг количества импульсов и относительной информации фазы между сигналами A, B можно одновременно получить информацию о положении и направлении вращения.
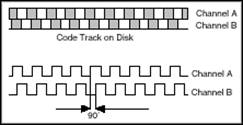
Рисунок 2. Выходные сигналы квадратурных кодеров A и B
Кроме того, некоторые квадратурные кодеры также включают третий выходной канал, называемый нулевым сигналом или эталонным сигналом. Один импульс выходит для каждого вращения этого канала. Вы можете использовать этот единственный импульс для точного расчета эталонной позиции. В большинстве кодеров этот сигнал называется осью z или индексом.
До настоящего времени эта статья представила односторонний инкрементный квадратурный энкодер. Поскольку сигналы A и B ссылаются на землю, они называются односторонними, и каждый сигнал имеет только одну (или только одну) линию. Другим обычно используемым энкодером является дифференциальный энкодер, а его сигналы A и B имеют два провода. Две линии сигнала A - A 'и A, а две линии B -сигнала - B' и B соответственно. Поскольку эти четыре линии всегда выводят известный уровень (0V или VCC), эта структура также называется структурой толчка. Когда a vcc, a 'равно 0 В. И наоборот, когда a равно 0 В, а ' - это VCC. В случае единоличного энкодера A является либо VCC, либо плавающей. Использование дифференциального обнаружения может обеспечить точность сигнала, поэтому дифференциальные кодеры обычно могут использоваться в средах с большим электрическим шумом.
С помощью инкрементного энкодера можно измерить только информацию об изменении положения (из которой можно рассчитать скорость движения и ускорение), но абсолютное положение цели не может быть определена. Здесь мы представим третий тип энкодера: абсолютный энкодер, который может получить абсолютное положение цели. Этот энкодер, как и инкрементный энкодер, имеет чередующиеся непрозрачные секторы и прозрачные сектора. Тем не менее, абсолютный энкодер использует многокомпонентную зону на кодовом колесе кодера для формирования концентрического кодового канала, как целевое кольцо. Концентрический путь кода начинается с центра кода кодера и простирается наружу до внешней части кодовой платы. Каждый канал кода имеет в два раза больше раздела, чем его внутренний слой. Первый слой, внутренний канал кода, имеет только один сектор передачи света и один непрозрачный сектор; Второй слой в центре имеет два сектора передачи света и два непрозрачных сектора; И есть четыре сектора передачи света и непрозрачные сектора для третьего кодового канала. Если энкодер имеет 10 каналов кода уровня, то самый внешний кодовый канал имеет 512 секторов; Если есть 16 каналов кода уровня, то самый внешний кодовый канал имеет 32 767 секторов.
Поскольку абсолютный энкодер имеет более одного количества секторов на кодовый канал, чем в том, что внутри него, количество секторов образует бинарную систему подсчета. В этом типе энкодера каждый кодовый канал на кодовом колесе соответствует источнику света и приемнику. Это означает, что 10-слойный энкодер требует 10 групп источников света и приемников, в то время как 16-слойный кодер требует 16 групп источников света и приемников.
Преимущество абсолютного энкодера заключается в том, что вы можете снизить скорость энкодера и заставить кодер энкодера сделать только одну революцию в течение всего цикла движения машины. Если машина путешествует на 10 дюймов, а энкодер имеет 16 бит точности, то точность положения машины составляет 10/65 536, или 0,00015 дюймов. Если машина путешествует дольше, например, 6 футов, то крупный вращающийся энкодер может убедиться, что каждая нога отслеживается; Второй этап, называемый тонким вращающимся энкодером, может отслеживать расстояния в пределах 1 фута. Это означает, что вы можете отрегулировать грубый кодер, чтобы он вращался вокруг всего 6-футового расстояния; Вы также можете отрегулировать тонкий энкодер, чтобы он мог разрешить диапазон 1 фута (или 12 дюймов).
Как измерить использование энкодера <br> для использования энкодера для измерения, должно быть основное электронное устройство, счетчик. Базовый счетчик генерирует значение через несколько входных каналов, чтобы указать количество обнаруженных краев (т.е. изменяется от низкого до высокого или высокого до низкого уровня в форме волны). Большинство счетчиков имеют три взаимосвязанных входных входных данных, источника и выбора вверх/вниз. Счетчик записывает количество событий при вводе источника и подсчитывается вверх или вниз в соответствии с состоянием линии выбора вверх/вниз. Например: если бит статуса вверх/вниз «высокий», то счетчик отсчитает; Если бит статуса вверх/вниз «низкий», то счетчик отсчитает. На рисунке 3 показана упрощенная диаграмма противоположной блокировки.

Рисунок 3. Упрощенная модель счетчика
Энкодеры обычно имеют 5 проводов, которые необходимо подключить. Различные энкодеры, цвет этих линий не один. Вы можете использовать эти провода для питания энкодера и прочитать сигналы A, B и Z. На рисунке 4 показано типичное определение интерфейса для инкрементного энкодера.

Рисунок 4. Инкрементный интерфейс энкодера
Следующий шаг - решить, где эти линии должны быть связаны. Как упомянуто выше, сигнал A подсчитывается с исходным терминалом, и импульсы в его сигнале подсчитываются. Сигнал B подключен к порту выбора вверх/вниз. Подключите любой источник питания +5 В к питанию и подключениям к заземлению В большинстве случаев достаточно одной цифровой линии для устройства для сбора данных.
Поскольку края сигнала подсчитываются, следующее, что вам нужно рассмотреть, это то, как эти значения должны быть преобразованы в информацию о положении. Процесс преобразования значения края в информацию о положении зависит от типа используемого кодирования. Существует три основных типа кодировки: x1, x2 и x4.
X1 Кодирование
На рисунке 5 показано количество счетов с плюсминусом в течение квадратурного периода и соответствующий тип кодирования X1. Когда канал А ведет канал B, приращение происходит на краю подъема канала A. Когда канал B ведет канал A, уменьшение происходит на падении канала A.
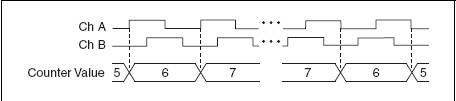
Рисунок 5. Кодирование x1
X2 кодирование
Кодирование x2 аналогична вышеуказанному процессу, за исключением того, что каждое преимущество счетчика канала увеличивается или уменьшается, в зависимости от того, какой канал направляется. Значение счетчика будет увеличиваться на 2 или уменьшаться на 2 каждого цикла, как показано на рисунке 6.

Рисунок 6. Кодирование x2
X4 кодирование
В режиме кодирования X4 счетчик также увеличивается или уменьшается на каждом краю каналов A и B. Увеличивается ли количество счетчиков или уменьшается, зависит от того, какой канал ведет какой канал. Количество счетчиков увеличится на 4 или уменьшится на 4 каждых цикла.
После того, как вы установили тип кодирования и тип подсчета импульсов, вы можете использовать следующую формулу для преобразования числовой информации в информацию о положении:
Для положения вращения
Сумма вращения ![]()
Где n = количество импульсов, генерируемых кодером во время каждого вращения вала
x = тип кодирования
Для линейного положения
Смещение ![]()
Где PPI = импульс на дюйм (этот параметр относится к выбранному энкодеру)
Подключив энкодер с инструментом <br> в этом разделе, возьмите шасси Ni CDAQ-9172 и цифровой модуль серии NI 9401 C в качестве цифрового ввода-вывода. Использование различных измерительных приборов и оборудования аналогично этому процессу.
Используется оборудование:
CDAQ-9172: NI COMPACTDAQ 8-SLOT HI-SPEED USB Шасси
Ni 9401: 8-канальный, 5 В/TTL Высокая скорость, двунаправленный цифровой модуль ввода-вывода
24 Импульс/вращение квадратурное энкодер
NI 9401 имеет разъем D-Sub, который обеспечивает подключение для 8 цифровых каналов. Каждый канал имеет цифровой порт ввода -вывода, который может быть подключен к устройству цифрового ввода или вывода. Только через 5-й и 6-й слоты на шасси вы можете подключиться к двум счетчикам в CDAQ-9172; Поэтому вставьте 9401 в 5 -й слот.
Согласно этим спецификациям, соединение A на кодере подключено к контакту 14, а соединение B подключено к контакту 17, а «мощность 5 В постоянного тока» подключено к любой неиспользованной линии цифр, установленной «Высокой». «Подключитесь к любому COM -порту.
Начните измерение
Теперь, когда энкодер был подключен к устройству измерения, вы можете использовать программное обеспечение для графического программирования NI LabVIEW для передачи этих данных на компьютер для наблюдения и анализа.
Выдержка из: ni "Общее руководство измерения"
Поделиться с:
Отправить Запрос

Ms. carol Dong
Номер Телефона :86-431-85543703
Fax:86-431---88634119
Мобильный Телефон:+8613894866263
Электронная Почта:sales@encoders.com.cn
Адрес Компании :333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
мобильный сайт
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.